Comparative Analysis of Hierarchical and Integrated Trajectory Planning Architectures for Autonomous Vehicles in Multi-Scenario Environments
Keywords:
Autonomous Vehicles, Integrated Planners, Car-Following, Lane-Changing, Unprotected Left TurnsAbstract
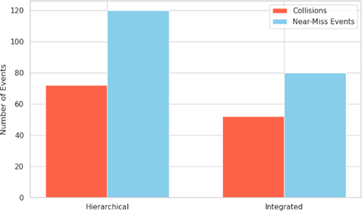
Autonomous vehicles (AVs) rely on effective trajectory planning to ensure safe, efficient, and comfortable operation across diverse driving scenarios. This study investigates the comparative performance of hierarchical and integrated trajectory planning architectures under multiple simulated driving scenarios, including car-following, lane-changing, and corner-case situations such as unprotected left turns and roundabouts. Hierarchical planners, which decouple path and speed planning, were compared against integrated planners that optimize both simultaneously. Performance was evaluated using safety metrics (collisions and near-miss events), efficiency metrics (average travel time and speed consistency), and passenger comfort metrics (mean jerk and acceleration variation). Results indicate that integrated planners outperform hierarchical planners across all dimensions, reducing collisions by 28%, improving speed consistency by 12%, and providing smoother ride quality. A composite performance index further confirmed the superiority of integrated planners, highlighting their adaptability in complex and dynamic traffic conditions. These findings suggest that integrated trajectory planning architectures offer significant advantages for real-world AV deployment, enhancing safety, operational efficiency, and passenger comfort. Future work should extend these findings through real-world testing and incorporation of adaptive learning-based trajectory optimization techniques.