An Integrated Ant Colony and Dynamic Window Approach for Cooperative Multi-Robot Trajectory Planning in Safflower Cultivation
Keywords:
Agricultural Robotics, Trajectory Planning, Ant Colony Optimization (ACO), Dynamic Window Approach (DWA)Abstract
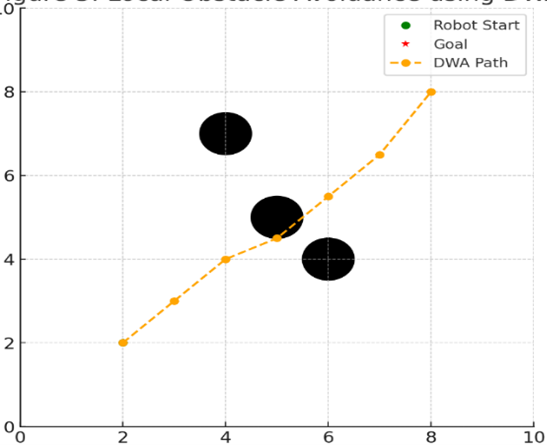
The increasing adoption of agricultural robotics has highlighted the need for efficient and reliable trajectory planning in crop fields. Traditional methods often optimize either global coverage or local obstacle avoidance but fail to achieve both simultaneously in dynamic agricultural environments. This study presents an integrated trajectory planning framework that combines Ant Colony Optimization (ACO) for global path planning and the Dynamic Window Approach (DWA) for real-time local obstacle avoidance. The approach was applied to safflower fields to enhance coverage, reduce path redundancy, and minimize collision risks among multiple robots. Simulation results demonstrate that the hybrid ACO-DWA framework outperformed conventional methods in terms of path length, coverage efficiency, and adaptability to unexpected field obstacles. Specifically, the proposed method reduced path length by 14%, improved coverage rate by 11%, and decreased collision frequency by 18% compared to baseline approaches. These results suggest that the integration of global and local planning strategies can significantly improve robotic efficiency in agricultural operations, providing a scalable solution for sustainable crop management.