Multi-Objective Autonomous Exploration for Simultaneous Mapping and Spatial Process Reconstruction Using Gaussian Processes
Keywords:
Autonomous mobile robots, Multi-objective exploration, Occupancy grid mapping.Abstract
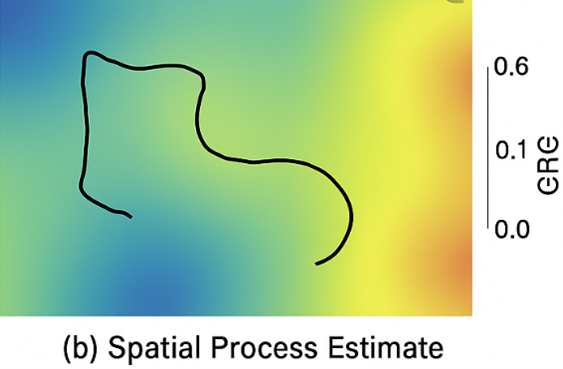
Autonomous mobile robots operating in unknown environments face the dual challenge of efficiently mapping their surroundings while simultaneously reconstructing spatially distributed environmental processes. This study proposes a novel multi-objective exploration framework that integrates occupancy grid mapping with Gaussian Process regression for spatial field estimation. The approach incorporates uncertainty-aware planning and a multi-step goal sequencing strategy to optimize environment coverage, reduce process reconstruction error, and minimize travel distance. Experimental evaluations in an indoor environment demonstrate that the proposed method significantly outperforms baseline frontier-based and random navigation strategies in terms of map coverage (92.4% ± 2.1%), spatial process estimation accuracy (RMSE: 0.18 ± 0.04), and exploration efficiency. The results validate the benefits of integrating process uncertainty into the planning utility and highlight the potential of Gaussian Process-informed exploration for autonomous environmental monitoring. Future research will focus on extending the framework to dynamic, large-scale outdoor scenarios and incorporating multi-modal sensor fusion to enhance robustness and adaptability.