A Hybrid ACO-DWA and Distributed Task Allocation Framework for Efficient Multi-Robot Operations in Unstructured Agricultural Environments
Keywords:
Autonomous Robots, Agricultural Operations, Multi-Robot Coordination, Ant Colony Optimization (ACO), Dynamic Window Approach (DWA), Path PlanningAbstract
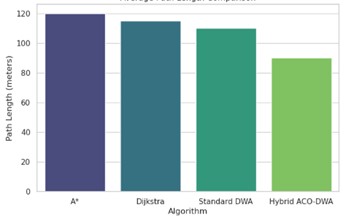
The deployment of multiple autonomous robots in agricultural operations offers significant potential for improving efficiency, reducing labor costs, and enhancing sustainability. However, navigating unstructured farm environments while coordinating multiple robots presents challenges such as collision avoidance, dynamic obstacle management, and efficient task allocation. This study proposes a novel framework that integrates a hybrid Ant Colony Optimization (ACO) and Dynamic Window Approach (DWA) for global path planning with a distributed priority-based task allocation strategy. The ACO-DWA hybrid optimizes global trajectories while ensuring smooth and dynamically feasible paths, whereas the distributed priority-based mechanism enables conflict-free coordination and balanced task distribution among multiple robots. Extensive simulations and ROS-based experiments were conducted in 2.5D grid-based farm environments with varying terrain, obstacles, and robot densities. Results indicate that the proposed framework outperforms conventional algorithms in terms of path length, energy consumption, task completion time, and collision avoidance. Scalability analysis demonstrates the framework’s ability to maintain high performance with increasing robot team sizes. Overall, the proposed methodology provides a robust, efficient, and scalable solution for autonomous multi-robot operations in complex agricultural settings, with potential applications in harvesting, monitoring, and precision farming.