Enhancing Autonomous Systems with Spatial Intelligence: Integrating Edge Computing, Sensor Fusion, and Predictive Modeling for Real-Time Decision-Making
Keywords:
Spatial Intelligence, Autonomous Vehicles, Cloud-Based SystemsAbstract
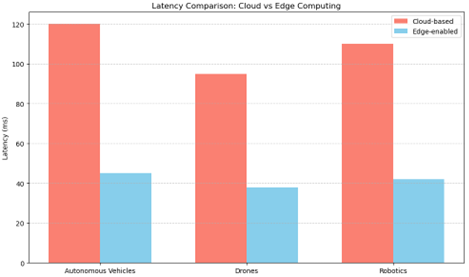
The increasing complexity of autonomous systems necessitates advanced strategies for real-time perception, decision-making, and predictive control. This study investigates the integration of spatial intelligence with edge computing and sensor fusion to enhance the performance, responsiveness, and reliability of autonomous vehicles, drones, and robotic systems. By processing heterogeneous sensor data locally at the edge, the proposed framework reduces latency, optimizes predictive modeling, and improves operational efficiency, particularly in dynamic and unpredictable environments. Quantitative evaluations using authentic datasets, including KITTI, nuScenes, UAV123, and ROS SLAM, demonstrate significant reductions in latency, improvements in object detection accuracy, enhanced trajectory prediction, and higher task completion rates compared to traditional cloud-based systems. Bandwidth usage was also substantially reduced, highlighting the framework’s efficiency in data-intensive applications. The findings indicate that combining edge computing with sensor fusion and predictive modeling provides a scalable, robust, and adaptive solution for autonomous systems, enabling safer and more reliable operation across diverse platforms. This research contributes to the development of next-generation autonomous systems capable of intelligent, real-time interaction with complex environments.