Hilbert-Curve-Driven Point Cloud Semantic Segmentation: Enhancing Spatial Locality Preservation for Improved Accuracy and Efficiency
Keywords:
Point Cloud Semantic Segmentation, 3D Data, Hilbert Space-Filling Curves, Spatial LocalityAbstract
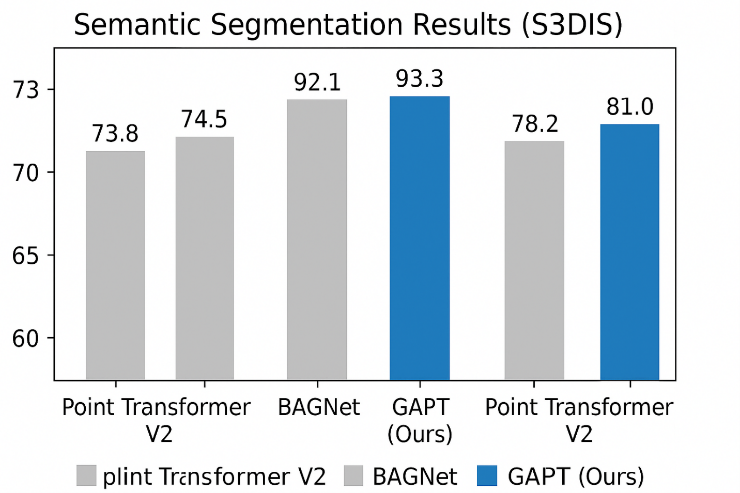
Point cloud semantic segmentation remains a challenging problem due to the irregular and unordered nature of 3D data, which complicates the learning of spatial relationships between points. This study introduces a novel segmentation framework that leverages Hilbert space-filling curves to impose an ordering on points while preserving spatial locality. By encoding geometric features in a Hilbert-ordered sequence, our method enables more efficient neighborhood aggregation and improved feature learning compared to conventional graph-based and transformer-based approaches. Experiments conducted on the S3DIS benchmark dataset demonstrate notable improvements in mean Intersection over Union (mIoU) and per-class IoU, particularly in geometrically complex classes such as beams, columns, and bookshelves. The proposed method also exhibits robustness to point sparsity and boundary misclassification, achieving competitive performance with reduced computational overhead. These results highlight the potential of space-filling curve-driven ordering as a scalable and generalizable approach for large-scale 3D scene understanding, with applications in autonomous navigation, robotics, and digital twin development.