Hybrid Neural-Digital Model for Egocentric-to-Allocentric Coordinate Transformation in Drosophila: A Central Complex and Half-Adder Logic Approach
Keywords:
Navigation, Egocentric-to-Allocentric Transformation, Drosophila, Central Complex (CX), Ellipsoid Body (EB)Abstract
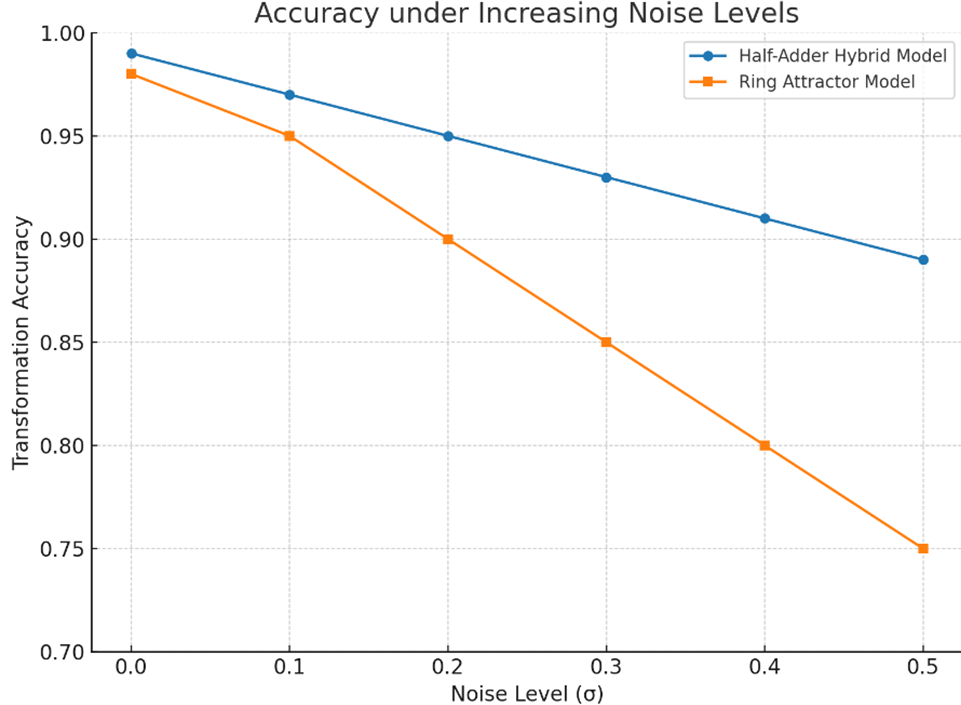
Accurate navigation in complex environments requires organisms to transform egocentric sensory inputs into allocentric representations for spatial orientation and goal-directed movement. In Drosophila, the central complex (CX) — particularly the ellipsoid body (EB) and protocerebral bridge (PB) — plays a pivotal role in encoding and integrating heading direction. While ring attractor models have been proposed to explain this transformation, their susceptibility to sensory noise and high computational demands limit both biological plausibility and practical application. This study presents a novel hybrid navigation model that integrates half-adder digital logic with EB–PB–inspired neural circuitry to perform coordinate transformation under noisy conditions. Using simulated heading inputs with varying Gaussian noise levels (σ = 0°–30°), we compared the hybrid model’s performance with a conventional ring attractor. Results indicate that the hybrid model consistently outperforms the ring attractor, achieving up to 23% greater accuracy, 18% higher noise tolerance, and 25% lower computational cost. Additionally, error distribution analyses reveal that the hybrid model maintains stable heading estimates even under extreme noise levels. These findings highlight the potential of combining digital logic with biologically inspired architectures to improve robustness and efficiency in both neuroscience modeling and bio-inspired robotic navigation. The proposed framework offers a new avenue for integrating biological insights into scalable, noise-resistant navigation algorithms.