NGEL-SLAM vs. Uni-SLAM and SP-SLAM: A Comparative Study of Hybrid Neural SLAM Architectures in Diverse Environments
Keywords:
Spatio-Temporal Topic Modeling, Tourism Analytics, Latent Dirichlet Allocation (LDA), Sentence EmbeddingsAbstract
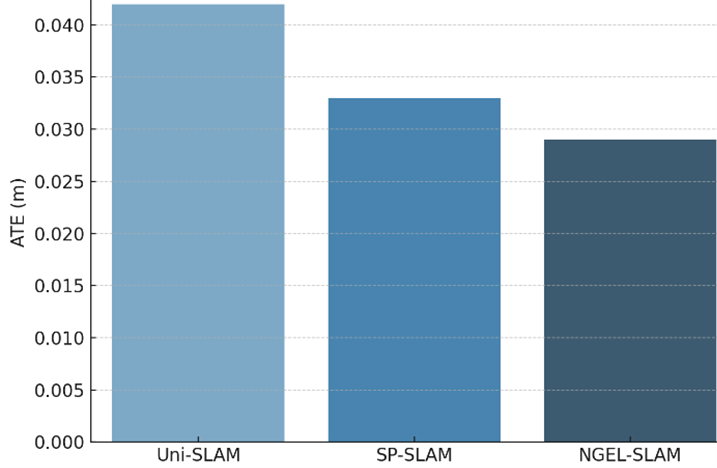
Recent advancements in Simultaneous Localization and Mapping (SLAM) have increasingly shifted toward hybrid frameworks that integrate deep learning and geometric algorithms. This study presents a comparative evaluation of three state-of-the-art SLAM systems—Uni-SLAM, SP-SLAM, and NGEL-SLAM—using publicly available datasets from indoor (TUM RGB-D) and outdoor (KITTI) scenes. The research focuses on performance metrics such as Absolute Trajectory Error (ATE), Relative Pose Error (RPE), Mean Intersection over Union (mIoU) for semantic segmentation, and real-time inference speed. NGEL-SLAM demonstrates superior global consistency and semantic segmentation quality, achieving an ATE of 0.029 m and mIoU of 0.74, outperforming its counterparts in long-range and dynamic scenes. In contrast, Uni-SLAM achieves faster inference but struggles with pose drift in outdoor scenarios. SP-SLAM offers a middle ground, optimized for embedded platforms but with reduced semantic fidelity. These results support the growing consensus that loop-aware, hybrid neural SLAM systems provide the most accurate and scalable mapping solutions, especially when deployed in complex and changing environments.